それぞれの研究の詳細は研究業績ページの各文献をご覧ください
- ファジィモデルに基づく制御
(理論的成果多数、ボストン大学との共同研究)
 ←映像はここ ←映像はここ
- マイクロヘリコプタ曲芸飛行制御(輪くぐりに成功)
田中研ではヘリコプタ・飛行ロボットの研究に力を入れてます!!
ホバーリング安定化制御 完全自動制御による
輪くぐり成功
 ←映像はここ→ ←映像はここ→
ホーバーリング安定化制御時 内界センサのみによる
のヘリからの空撮映像 飛行制御
 ←映像はここ→ ←映像はここ→
 ←映像はここ ←映像はここ
- 脳波で動く車椅子
最新のシステム
  ←映像ここ ←映像ここ
旧システム
 ←映像ここ ←映像ここ
日経ネット上で放映されました.
東京MXテレビ 「ガリレオチャンネル」
2008年4月18日午後8時放映されました
- テレビ朝日新番組「近未来×予測テレビ ジキル&ハイド」
2008年3月9日放映
世界一受けたい授業の映像
 ←映像はここ ←映像はここ
TBSラジオ「伊集院光 日曜日の秘密基地」
音声はここ(約5分)
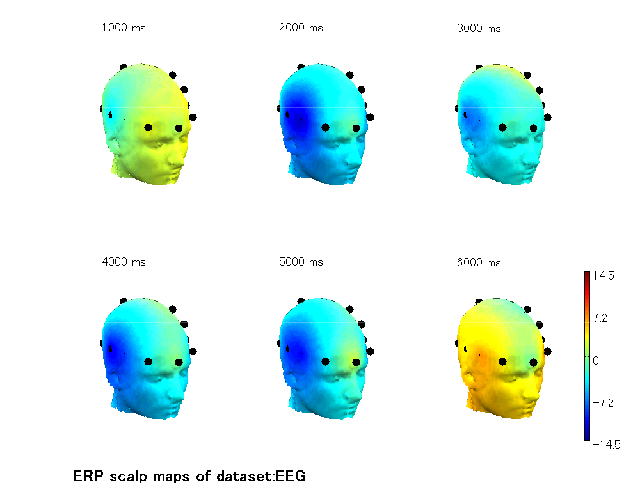
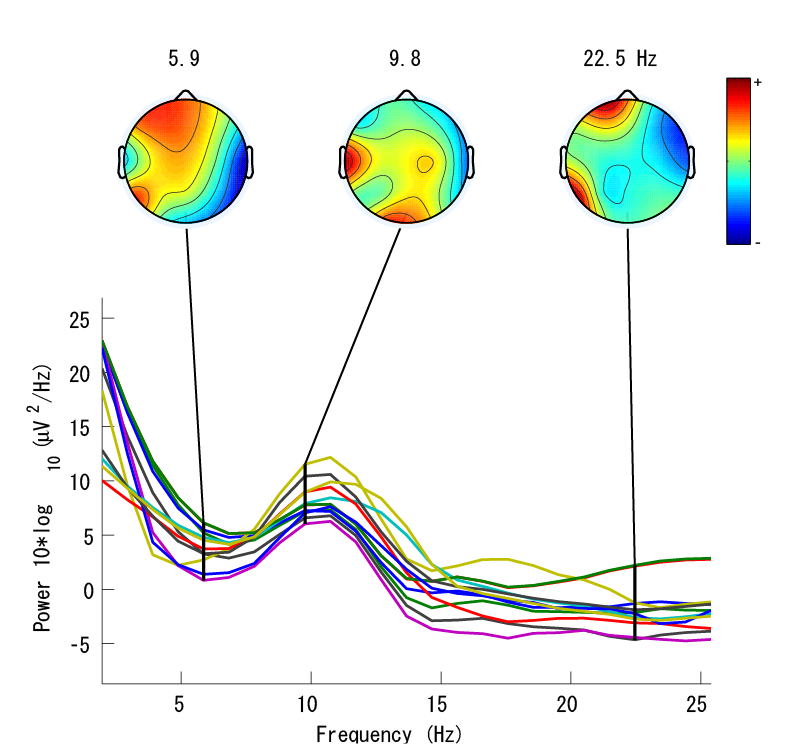
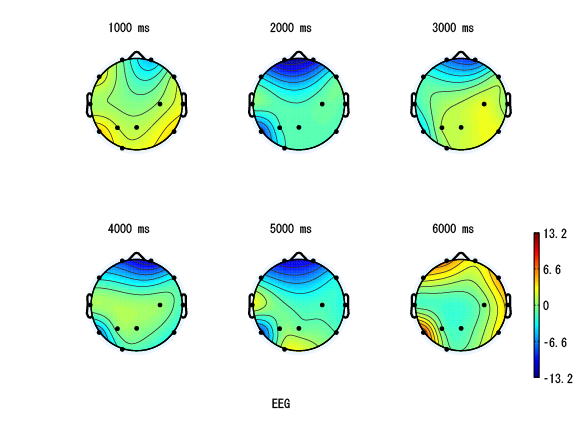
脳波解析例
- 光トポグラフィによる脳機能情報の
ロボットシステムへの応用に関する研究
- 自動車関連のダイナミクス解析に関する研究
(日野自動車との共同研究)
 
- エンジン制御に関する研究(トヨタ自動車との共同研究)
- 高機能化マニピュレータに関する研究
(セイコーエプソンとの共同研究)
- 多重連結型ロボットの後退制御
- ビジュアルフィードバック
 ←映像はここ→ ←映像はここ→ 
- ホバークラフト制御
- 回転方向を変えずに前進・後退可能な飛行ロボット
 ←映像はここ ←映像はここ 
- 高効率可変翼型鳥ロボット
 ←映像はここ ←映像はここ
最新の羽ばたき研究
 ←映像はここ ←映像はここ
- 視覚センサももつ情報収集鳥ロボット
 ←映像はここ ←映像はここ
その他の映像
鳥目線の映像(画質悪)
室内でのビジュアルフィードバック実験
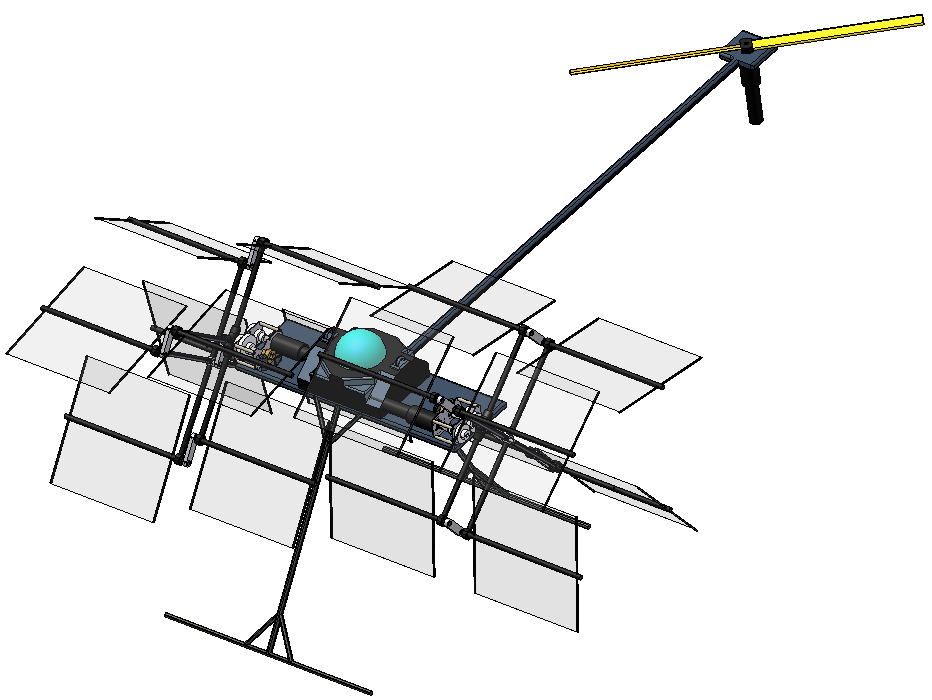
- 超高効率新型マイクロ飛行ロボットの開発
最新! マルチ平行回転翼
世界初! リバーシブル翼構造
 ←映像はここ ←映像はここ
 ←映像はここ ←映像はここ
なんと,浮上にも成功!
 ←映像はここ ←映像はここ
伸縮翼飛行ロボット
 ←新型機はパワーアップ ←新型機はパワーアップ
映像はここ
  ←浮遊成功 ←浮遊成功
映像はここ
- 弾性エネルギを付加した受動歩行ロボット
 ←映像はここ ←映像はここ
- 陸・空ロボット協調swarm制御
(ボストン大学と共同研究)
↑
映像はここ
- 飛行ロボットの原理を風力発電へ
(金沢大学、企業との共同研究)
- 群知能に関する研究&インターネットによるロボットの遠隔自動制御
(ボストン大学と共同研究)
インターネットによる日米間ロボット操作
- 自律移動ロボット
↑
映像はここ
- コバチ体操ロボット
 ←映像はここ→ ←映像はここ→
- 人間のスキル動作獲得
 ←映像はここ ←映像はここ
その他の映像
屈伸動作の獲得
歩行動作の獲得(未完成)
- 脳波、脈派による個人判別
ご意見・ご感想(田中研に御用の方) 
Copyright (C) 2005 Tanaka Laboratory, UEC. All Rights Reserved.
|